






")


")






















|
Количество
|
Стоимость
|
||
|
|
|||
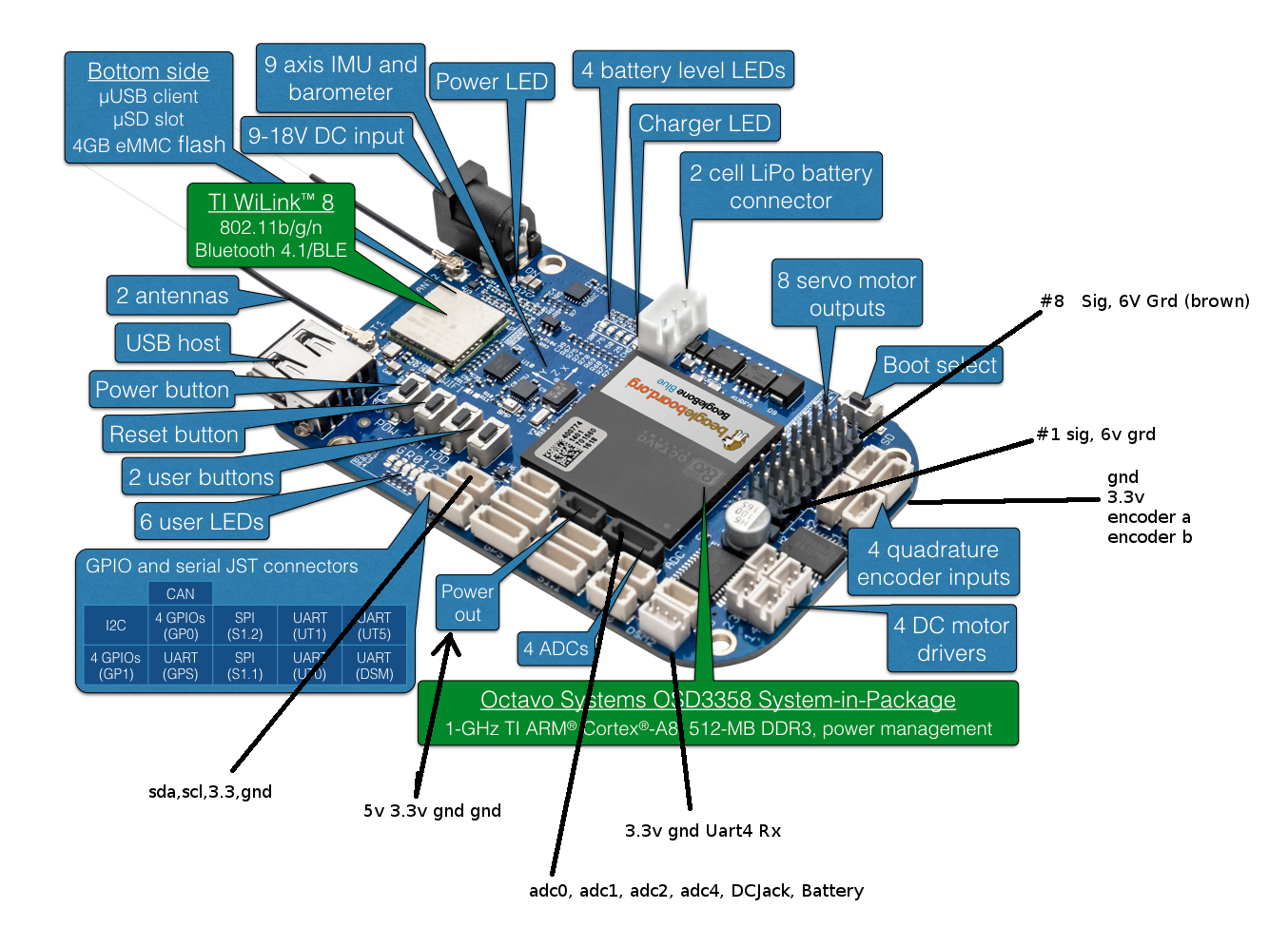
BeagleBone® Blue — это компьютер для робототехники, созданный на базе Linux. Интегрирован в небольшую плату размером 3.5" x 2.15" с микропроцессором Octavo OSD3358,вместе с wi-fi/bluetooth, IMU/барометром, регулятором мощности, индикатором состояния зарядки, H-Bridges, дискретными разъемами для генераторов постоянного тока, 8 разъемов для сервоприводов и для множества других периферийных устройств. Открытый исходный код, мощная поддержка сообщества и широкий спектр возможностей делает создание небольших роботов с BeagleBone® Blue очень простым, увлекательным и доступным.
BeagleBone® Blue сочетает в себе высокопроизводительный гибкий интерфейс WiFi / Bluetooth WiLink ™ BeagleBone® Black Wireless и возможности робототехники Robotics Cape от Strawson Design. BeagleBone® Blue имеет встроенное двухэлементное (2S) управление батареей LiPo с зарядным устройством и светодиодами уровня заряда батареи, 8 выходов серводвигателей, 4 драйвера двигателя постоянного тока, 4 входа квадратурного энкодера, широкий спектр разъемов GPIO и последовательных протоколов, включая CAN, 9-осевой IMU и барометр, 4 входа ADC, USB-интерфейс ПК, хост-порт USB 2.0, кнопка сброса, кнопка питания, две настраиваемые пользователем кнопки и шесть индикаторных светодиодов.
BeagleBone® Blue предназначен для разработки проектов в области интернета вещей, умного дома, промышленной автоматизации и управления процессами, человеко-машинного интерфейса, управления приводами и дронами, а также концентратора различных датчиков или в других областях робототехники.
BeagleBone® Blue, созданный на основе пакета System-In-Package компании Octavo Systems, который объединяет высокопроизводительный процессор TI ARM и 512 МБ памяти DDR3, загружает Linux примерно за 10 секунд и позволяет вам начать разработку через веб-браузер менее чем за 5 минут с помощью всего лишь одного один USB-кабель.
Основные особенности:
Процессор: Octavo Systems OSD3358
- Процессор AM335x 1GHz ARM® Cortex-A8
- Оперативная память 512MB DDR3
- 4GB 8-bit eMMC встроенной флэш-памяти
- Встроенное управление питанием
- 2 × 32-битных 200-МГц программируемых блока реального времени (PRU)
- ЦП поддерживает ускоритель NEON с плавающей запятой
- ARM Cortex-M3
- USB2 host/client
Разъемы и датчики
- Аккумулятор: 2-cell LiPo, светодиодный монитор для проверки состояния заряда
- Вход зарядного устройства: 9-18V
- Беспроводное соединение: 802.11bgn, Bluetooth 4.1 and BLE
- Управление двигателями: 8 6V серво выхода, 4 двунаправленных выхода двигателей постоянного тока, 4 quadrature encoder входа
- Датчики: 9-осевой IMU (акселерометр, гироскоп, магнитометр), барометр, термометр
- Пользовательский интерфейс: 11 программируемых светодиода LED, 2 программируемые кнопки
- Легко подключаемые JST интерфейсы для добавления доп. разъемов и устройств таких как: GPS, DSM2 radio, UARTs, SPI, I2C, аналоговый 1.8V, 3.3V GPIOs
Совместимое ПО
- ROS, ArduPilot
- MATLAB and Simulink
- LabVIEW
- Cloud9 IDE on Node.js
- Python, OpenCV, ... и тд!
Технические характеристики:
| Элемент | Описание | |
|---|---|---|
| Процессор (интегрирован в OSD3358): | ● AM335x 1GHz ARM® Cortex-A8 ● Графический ускоритель SGX530 ● NEON ускоритель с плавающей запятой ● 2x 32-битных микроконтроллера PRU 200 МГц |
|
| Объем памяти: | ● ОЗУ 512 МБ DDR3 800 МГц (встроено в OSD3358) ● Встроенная 8-битная флэш-память eMMC емкостью 4 ГБ ● Разъем SD / MMC для microSD |
|
Связь: |
Высокоскоростной клиентский порт USB 2.0: | доступ к USB0, клиентский режим через microUSB |
| Высокоскоростной хост-порт USB 2.0: | доступ к USB1, гнездо типа A, 500 мА LS / FS / HS | |
|
Поддерживает следующие режимы: |
2x2 MIMO | |
| AP | ||
| SmartConfig | ||
| STA | ||
| Wi-Fi Direct | ||
| Сеть через Wi-Fi на основе 802.11s | ||
Последовательный порт: |
UART0, UART1, UART5 доступны через 4-контактные разъемы JST. | |
| UART2 доступен через 6-контактный разъем JST (разъем типа EM-506 GPS) | ||
| UART4 RX доступен через 3-контактный разъем DSM2. | ||
| WiLink 1835 Bluetooth 4.1 с BLE | ||
| I2C1 доступен через 4-контактный разъем JST | ||
| SPI1 CS0 (S1.1) и SPI1 CS1 (S1.2) доступны через 6-контактные разъемы JST | ||
| CAN доступен через 4-контактный разъем JST (включая трансивер CAN1051 CAN) | ||
| 8 GPIO (GP0 и GPI1) доступны через 6-контактные разъемы JST | ||
| ADC Входы АЦП с 0 по 3 доступны через 6-контактный разъем JST | ||
| Выход питания 3,3 и 5 В постоянного тока через 4-контактный разъем JST | ||
Управление энергопотреблением: |
TPS65217C PMIC используется вместе с отдельным LDO для обеспечения питания системы (интегрирован в OSD3358) | |
Зарядное устройство для 2-элементных (2S) LiPo аккумуляторов (питание от разъема 9 - 18 В постоянного тока)
|
||
| Регулятор 6VDC 4A для управления выходами серводвигателя | ||
| Поддержка отладки: | контрольные точки JTAG | |
| Источник питания: | microUSB USB 2-элементный (2S) разъем LiPo аккумулятора 9 - разъем постоянного тока 18 В постоянного тока |
|
| Пользовательский ввод / вывод: | Кнопка питания Кнопка сброса Кнопка загрузки 2 настраиваемые пользователем кнопки 6 светодиодов, настраиваемых пользователем; Индикатор питания |
|
| Управление двигателем (требуется питание от разъема постоянного тока или батареи 2S): |
4 драйвера двигателя постоянного тока 4 входа квадратурного энкодера 8 выходов серводвигателя |
|
| Датчики: | 9-осевой IMU Барометр |
|
Элементы платы:
Информация для разработчиков Wiki: BeagleBone® Blue Schematic