






")


")















Ассортимент нашего магазина включает линейку камер объёма RealSense™ от компании Intel® — одного из лидеров области высокопроизводительной компьютерной техники и комплектующих.
Компания Intel сосредоточена на создании “технологий, изменяющих мир и обогащающих жизнь всех людей на планете” — так они формулируют свою цель. Имея такие большие амбиции, они работают над тем, чтобы совместно с другими решать мировые проблемы, с которыми никто не сможет справиться в одиночку. Современные технологии не могут быть изолированными и принадлежать одному лицу, поскольку они предназначаются для решения вопросов широкой публики и именно из-за распределенности и разнообразия задач и применений, кооперация в использовании технологий и программного обеспечения даёт наиболее значимые прорывы в развитии этих направлений.
Камеры глубины изображений имеют огромное количество применений и уже широко используются в промышленности, а также миллионами людей в повседневной жизни (face-ID, к примеру). Разработчики решений на их основе используют аппаратное и программное обеспечение, часто с открытым кодом, предлагаемые на рынке.
Исходя из своего названия, камеры глубины позволяют определять расстояние до объектов на получаемом изображении. Обычно каждому пикселю кроме данных о цветовых характеристиках присваивается определенное значение расстояния от источника съемки до снимаемого объекта.
Технология определения камерами глубины изображений развивается по следующим направлениям:
-
Structured Light — камеры структурного света (часто инфракрасный проектор совмещается с камерой визуального диапазона для получения снимков и совмещения в них полученных данных);
-
Time of Flight — камеры, основанные на измерении задержки во времени отраженного света;
-
Depth from Stereo — камеры, использующие классическую технологию построения объемного изображения из стерео снимка;
-
Light Field — камеры светового поля (пленоптические камеры);
-
Lidar — камеры с применением лазерных технологий, в т.ч. светодиодных лазеров.
Из 5 рассматриваемых способов построения видео глубины Structured Light, Time of Flight и Lidar отлично работают в помещениях на расстояниях от 10 сантиметров до 10 метров, а главное — весьма дешевы (что позволяет использовать их в массовых смартфонах), но только двум — Depth from Stereo и Light Field не мешает солнце и не создают помех соседние автомобили, поэтому они перспективны для применения вне помещений, в том числе и в автономном транспорте. При этом Light Field в разы дороже и менее точна на больших дистанциях, что делает её менее конкурентноспособной.
Компания Intel в своей линейке продукции использует три из 5-ти перечисленных выше технологий. Осталась “за бортом” Light Field, основанная на технологии фиксации светового поля, предполагающего фиксацию в каждой точке не цвета пикселя, а двумерной матрицы пикселей, превращая двумерный кадр в четырехмерный. Эта технология требует крупногабаритной и дорогой аппаратуры, что не вяжется с концепцией компании создания массовых высокопроизводительных микро-устройств в современном понимании технологического прогресса.
Чтобы не быть голословным — вот пример камеры, работающей по данной технологии:

Источник: Lytro poised to forever change filmmaking
Также пока не представлены устройства очень активно развивающейся технологии Time of Flight, использующей современные полупроводниковые устройства, работающие на высокой частоте для фиксации задержки в сигналах. Принцип действия данной технологии основан на измерении задержки света (ToF, Time-of-Flight). Свет, как бы ни казалось, что его скорость велика, но за один такт процессора с частотой 3 ГГц успевает пролететь около 10 сантиметров и если использовать импульсный источник света и специальную камеру, то остаётся измерить только задержку с которой свет возвращается в каждую точку, чтобы получить подобные данные:
Источник: видео Basler AG
Это очень активно развивающаяся технология, позволяющая получать данные с высоким fps и без “теней”, характерных для текстурированного света, что является отличным решением для применения в промышленных роботах. Скорее всего нас ещё ждут камеры RealSense™, работающие с применением этой технологии.
Линейка камер RealSense™ включает следующие модели:
-
Tracking Camera T265;
-
Depth Camera SR305;
-
LiDAR Camera L515;
-
Depth Camera D415 - D435 - D435i - D455
Tracking Camera T265, работающая с применением модуля Tracking Module T261 по существу не относится к камерам глубины в прямом понимании этого термина. Это компактная производительная камера слежения, которая может применяться в различных проектах с использованием компьютерного зрения. Она предназначена для работы в устройствах навигации и маппинга. T265 — это кроссплатформенное решение, удобное для разработчиков и полностью готовое к применению в проектах сферы робототехники, дополненной реальности и дронах.
Работа камеры основана на технологии V-SLAM, комбинирующей Simultaneous Localization and Mapping (SLAM) и широкоугольные камеры с инерциальным измерительным устройством Inertial Measurement Units (IMU). Это позволяет при прохождении маршрута составить карту с привязкой к объектам и при повторном прохождении по этому же маршруту (или в его пределах) получать отклонения от него не более 1%. Задержка между движением и его отображением в этой камере составляет на более 6 мс.
Один из вариантов применения - для навигации робота-пылесоса:
![]()
Depth Camera SR305, работающая с применением модуля Depth Module SR300 по технологии структурного света Coded Light (Structured Light). Она предназначена для измерения глубины изображений путем проставления каждому пикселю изображения своего значения расстояния от камеры до объекта съемки. Технологически в данной камере это достигается путем обработки информации о полученном изображении с RGB-камеры с излучаемым на объект съемки световым шаблоном-сеткой (Coded light) с последующим разложением и анализом этих данных при помощи визуального процессора Intel RealSense. SR305 использует различные шаблоны кодирующего цвета для увеличения точности измеряемых данных о глубине. Разрешение RGB-камеры, принимающей сигнал составляет 2Мпикс.

Данная камера является базовой и самой доступной в линейке камер глубины Intel RealSense и подходит для разработчиков, начинающих свои проекты в приложениях с дополненной реальностью (Augmented Reality), распознавании жестов, распознавании лица, построении скелетной анимации и предоставляя выгоды низкой стоимости плюс plug and play функционал при обеспечении глубины разрешения 640х480 пикселей при 60fps.
LiDAR Camera L515 — это самая компактная LiDAR камера с высоким разрешением для использования внутри помещений. Лидар (LIDAR, Light Detection and Ranging) — это технология получения и обработки информации об удалённых объектах с помощью активных оптических систем, использующих явления поглощения и рассеяния света в оптически прозрачных средах. В данной камере применяется технология лазерного сканирования MEMS mirror scanning technology, обеспечивающая получение данных о глубине изображения в максимальном разрешении и с высочайшей точностью при небольшом энергопотреблении всего в 3.5 Вт.
Данное устройство обеспечивает сканирование данных на расстоянии до 9 метров с получением до 23 млн. пикселей в секунду и при этом весит всего 100 грамм.

Она предназначена для проектов в логистике, робототехнике и 3D-сканировании.
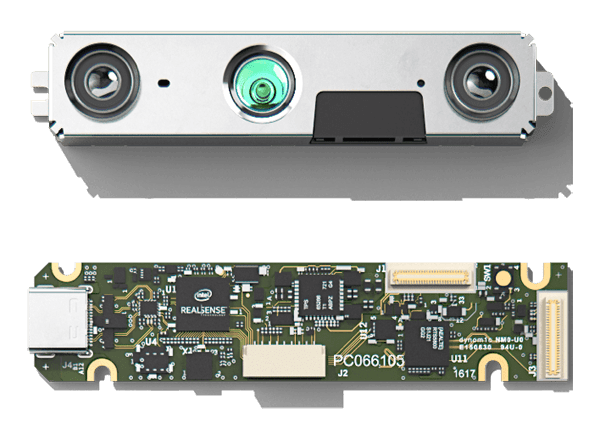
Depth Camera D415-D435-D435i-D455 на базе модулей Depth Module D400-D430. Данная линейка камер от 415-й до 455-й модели наращивает свой функционал и производительность.
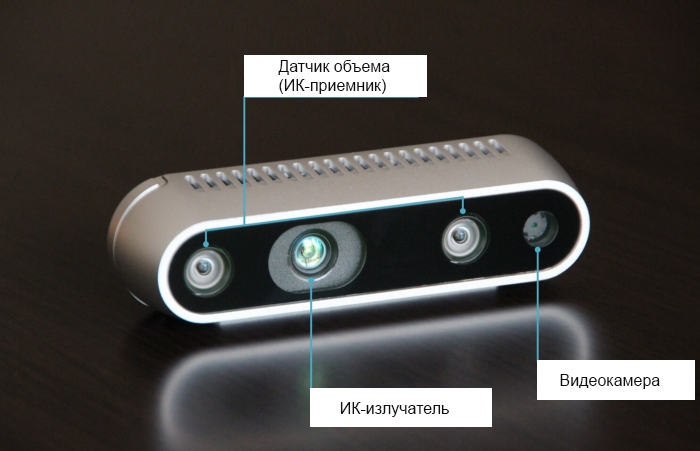
Эти камеры работают по технологии стереоглубины Stereo Depth (Depth from Stereo), т.е. определяют расстояние на основании различия в изображениях с двух приемников (ИК-камер), направленных в одном направлении и совмещая эти данные с получаемой видеокамерой картинкой. Расположение излучателей и приёмников показано на картинке:
Depth Camera D415 предназначена для измерения глубины изображений путем проставления каждому пикселю изображения своего значения расстояния от камеры до объекта съемки.
Данная камера является идеальным вариантом для 3D-сканирования, распознавания лица и других измерений данных объема и подходит для разработчиков, производителей и новаторов, стремящихся использовать данные глубины изображений.
Depth Camera D435 обладая камерой с широким углом обзора, является идеальным вариантом для приложений автоматизированной навигации и распознаания объектов.
Depth Camera D435i является модификацией камеры глубины Intel RealSense Depth Camera D435 с добавлением инерционного измерительного модуля inertial measurement unit (IMU), который позволяет определить положение (движения и повороты) в 6 степенях свободы (6 degrees of freedom — 6DoF). Он комбинирует данные с различных сенсоров с гироскопами для определения как вращения, так и движения в 3-х осях, а также тангаж, рыскание и крен. Он применяется для стабилизации изображения при движении камеры, что важно в игровых и указывающих устройствах.

Обладая камерой с широким углом обзора, данное устройство является идеальным вариантом для приложений автоматизированной навигации и распознаания объектов, позволяя точно получать данные в движении.
Depth Camera D455 является на сегодня топом линейки камер глубины Intel® RealSense™ Depth Camera D4хх. Она оснащена инерционным измерительным модулем IMU, который позволяет определить положение (движения и повороты) в 6 степенях свободы. Модуль комбинирует данные от различных сенсоров с гироскопами для определения как вращения, так и движения в 3-х осях, а также тангаж, рыскание и крен. Он применяется для стабилизации изображения при движении камеры, что важно в игровых и указывающих устройствах.

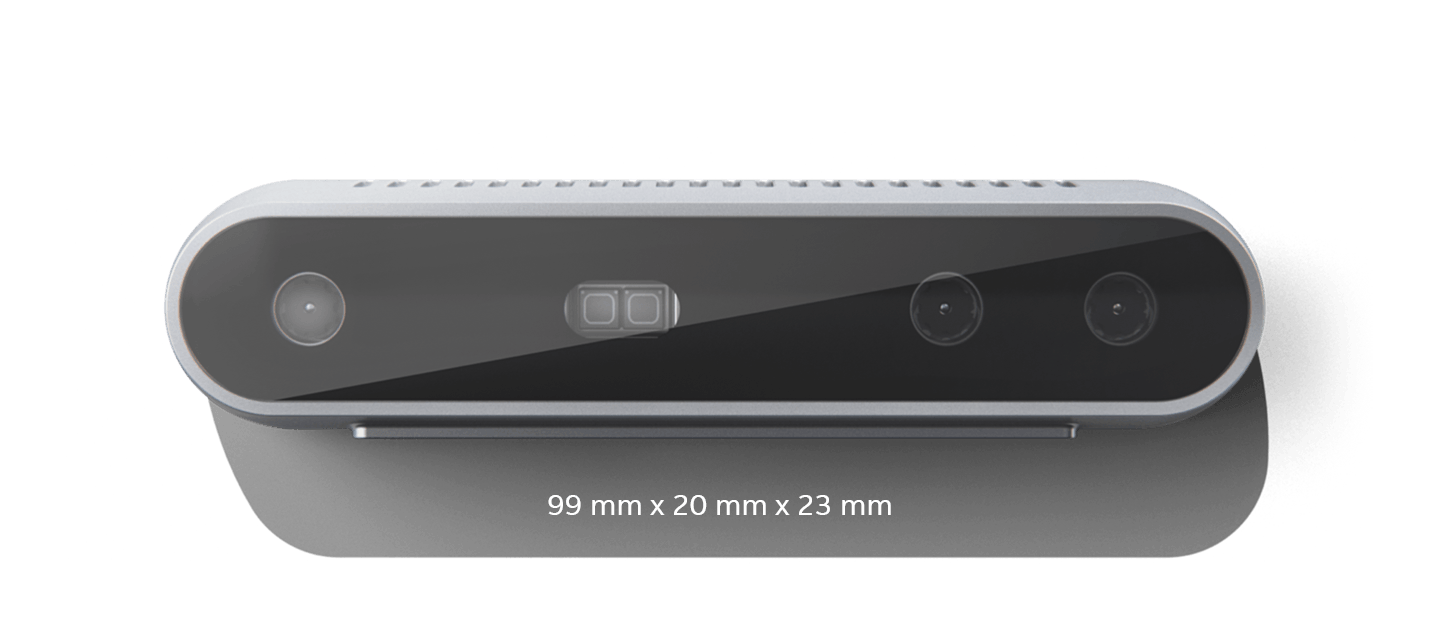
Особенностью данной модели является то, что расстояние между ИК-сенсорами увеличено до 95мм путем размещения их по краям модуля, что улучшает определение глубины изображения (ошибка определения не превышает 2% на дистанции 4м).
В камерах RealSense™ серии D400 применяется визуальный процессор Intel® RealSense™ D4, который использует сложные алгоритмы для обработки изображений, производимых 3D-камерой, а также вычисляет 3D-карты в высоком разрешении, при этом нет необходимости в выделенном графическом или хост-процессоре. Использование этого видеопроцессора ускоряет процесс проектирования и увеличивает пропускную способность для хост-процессора в системе.

Модули Depth Module D400-D430, на базе которых собираются камеры серии D400 — это готовое решение для ускорения разработки и интеграции новой продукции для систем виртуальной (VR, Virtual Reality) и дополненной реальности (AR, Augmented Reality), робототехники, дронов и других областей применения. Они используют технологию определения глубины с активным (D410, D415, D430) и пассивным (D400, D420) стерео режимом, технологию сенсора изображения: Global Shutter и Rolling Shutter, имеют 2 варианта Depth FOV - угла обзора (63.4° × 40.4° и 85.2° × 58°) и имеют глубину разрешения 1280х720 пикс. при 90fps. Подробнее с техническими характеристиками модулей можно ознакомиться по ссылке: https://www.intelrealsense.com/stereo-depth-modules-and-processors/
Для работы с данными камерами компания Intel предоставляет набор средств разработки — RealSense SDK 2.0 с возможностью самокалибровки камер, что позволяет производить калибровку камер менее чем за 15 секунд без необходимости использования специализированных приложений и аппаратуры. Этот комплект позволяет извлекать данные пространственных параметров из камер объема и переводить их в формат выбранной платформы — Windows, Linux, macOS и других. Пакет SDK также предлагает образцы открытого исходного кода и оболочки для различных языков программирования, включая Python, Node.js, C#/.NET и C/C++.
Завершая обзор линейки продукции RealSense™, можно сказать, что компания Intel предоставила возможность использовать готовые “коробочные” аппаратные решения для различных областей, использующих компьютерное зрение. Будь то трекинг, система предотвращения столкновений или системы распознавания жестов — для вас не будет проблемой подобрать соответствующее по техническим параметрам и рациональное по цене оборудование в нашем магазине.
