






")


")















Асортимент нашого магазину включає лінійку камер глибини RealSense ™ від компанії Intel® — одного з лідерів галузі високопродуктивної комп'ютерної техніки та комплектуючих.
Компанія Intel зосереджена на створенні "технологій, що змінюють світ і збагачують життя всіх людей на планеті" — так вони формулюють свою мету. Маючи такі великі амбіції, вони працюють над тим, щоб спільно з іншими вирішувати світові проблеми, з якими ніхто не зможе впоратися самотужки. Сучасні технології не можуть бути ізольованими і належати одній особі, оскільки вони призначаються для вирішення питань широкого колу людей і саме завдяки розподіленісті і різноманітністі завдань і застосувань, кооперації у використанні технологій та програмного забезпечення дає найбільш значущі прориви в розвитку цих напрямків.
Камери глибини зображень мають величезну кількість застосувань і вже широко використовуються в промисловості, а також мільйонами людей в повсякденному житті (face-ID, наприклад). Розробники рішень на їх основі використовують апаратне і програмне забезпечення, часто з відкритим кодом, пропоноване ринком.
Виходячи зі своєї назви, камери глибини дозволяють визначати відстань до об'єктів на вихідному зображенні. Зазвичай кожному пікселю крім даних про колірні характеристики присвоюється певне значення відстані від джерела зйомки до об'єкту, що знімається.
Технологія визначення камерами глибини зображень розвивається за наступними напрямками:
-
Structured Light — камери структурного світла (часто інфрачервоний проектор поєднується з камерою візуального діапазону для отримання знімків та суміщення в них отриманих даних);
-
Time of Flight — камери, засновані на вимірі затримки в часі відбитого світла;
-
Depth from Stereo — камери, що використовують класичну технологію побудови об'ємного зображення зі стерео знімку;
-
Light Field — камери світлового поля (плівоптичні камери);
-
Lidar — камери з застосуванням лазерних технологій, в т.ч. світлодіодних лазерів.
З 5-ти розглянутих способів побудови відео глибини Structured Light, Time of Flight і Lidar відмінно працюють в приміщеннях на відстанях від 10 сантиметрів до 10 метрів, а головне — дуже дешеві (що дозволяє використовувати їх в масових смартфонах), але тільки двом — Depth from Stereo і Light Field не заважає сонце і не створюють перешкод сусідні автомобілі, тому вони перспективні для застосування поза приміщеннями, в тому числі і в автономному транспорті. При цьому технологія Light Field в рази дорожче і менш точна на великих дистанціях, що робить її менш конкурентоспроможною.
Компанія Intel в своїй лінійці продукції використовує три з 5-х перерахованих вище технологій. Залишилася "за бортом" Light Field, заснована на технології фіксації світлового поля, який передбачає фіксацію в кожній точці не кольору пікселя, а двовимірної матриці пікселів, перетворюючи двовимірний кадр в чотиривимірний. Ця технологія вимагає великогабаритної і дорогої апаратури, що не в'яжеться з концепцією компанії створення масових високопродуктивних мікро-пристроїв в сучасному розумінні технологічного прогресу.
Ось приклад камери, що працює за даною технологією:

Джерело: Lytro poised to forever change filmmaking
Також поки не представлені пристрої технології Time of Flight, що дуже активно розвивається та використовує сучасні напівпровідникові пристрої, що працюють на високій частоті для фіксації затримки в сигналах. Принцип дії даної технології заснований на вимірюванні затримки світла (ToF, Time-of-Flight). Світло, як би не здавалося, що його швидкість велика, але за один такт процесора з частотою 3 ГГц встигає пролетіти близько 10 сантиметрів і якщо використовувати імпульсне джерело світла і спеціальну камеру, то залишається виміряти тільки затримку з якою світло повертається в кожну точку, щоб отримати подібні дані:
Джерело: відео Basler AG
Це технологія, що дуже активно розвивається та дозволяє отримувати дані з високим fps і без "тіней", характерних для текстурованого світла, що є відмінним рішенням для застосування в промислових роботах. Швидше за все нас ще чекають камери RealSense™, що працюють із застосуванням цієї технології.
Лінійка камер RealSense™ включає наступні моделі:
-
Tracking Camera T265;
-
Depth Camera SR305;
-
LiDAR Camera L515;
-
Depth Camera D415 - D435 - D435i - D455
Tracking Camera T265, що працює із застосуванням модуля Tracking Module T261 по суті не відноситься до камер глибини в прямому розумінні цього терміну. Це компактна продуктивна камера стеження, яка може застосовуватися в різних проектах з використанням комп'ютерного зору. Вона призначена для роботи в пристроях навігації і маппінга. T265 — це кроссплатформне рішення, зручне для розробників і повністю готове до застосування в проектах сфери робототехніки, доповненої реальністі (AR) і дронах.
Робота камери заснована на технології V-SLAM, комбінує Simultaneous Localization and Mapping (SLAM) і ширококутні камери з інерціальним вимірювальним пристроєм Inertial Measurement Units (IMU). Це дозволяє при проходженні маршруту скласти карту з прив'язкою до об'єктів і при повторному проходженні по цьому ж маршруту (або в його межах) отримувати відхилення від нього не більше 1%. Затримка між рухом і його відображенням в цій камері складає не більше 6 мс.
Один з варіантів застосування - для навігації робота-пилососа:
![]()
Depth Camera SR305 працює із застосуванням модуля Depth Module SR300 за технологією структурного світла Coded Light (Structured Light). Вона призначена для вимірювання глибини зображень шляхом проставлення кожному пікселю зображення свого значення відстані від камери до об'єкта зйомки. Технологічно в даній камері це досягається шляхом обробки інформації про отримане зображення з RGB-камери з випромінюваним на об'єкт зйомки світловим шаблоном-сіткою (Coded light) з подальшим розкладанням і аналізом цих даних за допомогою візуального процесора Intel RealSense. SR305 використовує різні шаблони кодуючого кольору для збільшення точності вимірюваних даних про глибину. Роздільна здатність RGB-камери, що приймає сигнал становить 2Мпикс.

Дана камера є базовою і найбільш доступною в лінійці камер глибини Intel RealSense і підходить для розробників, що починають свої проекти в додатках з доповненою реальністю (Augmented Reality), розпізнаванням жестів, розпізнаванням осіб, побудові скелетної анімації та надають вигоди низької вартості, а також plug and play функціонал при забезпеченні глибини роздільної здатності 640х480 пікселів при 60fps.
LiDAR Camera L515 — це найкомпактніша LiDAR камера з високою роздільною здатністю для використання всередині приміщень. Лідар (LIDAR, Light Detection and Ranging) — це технологія отримання та обробки інформації про віддалені об'єкти за допомогою активних оптичних систем, що використовують явища поглинання і розсіювання світла в оптично прозорих середовищах. У цьому пристрої застосовується технологія лазерного сканування MEMS mirror scanning technology, що забезпечує отримання даних про глибину зображення з максимальною роздільною здатністю і з високою точністю при невеликому енергоспоживанні всього в 3.5 Вт.
Даний пристрій забехпечує сканування даних на відстані до 9 метрів з отриманням до 23 млн. пікселів в секунду і при цьому важить всього 100 грамів.

Вона може застосовуватися та призначена для проектів логістики, робототехніки та 3D-сканування.
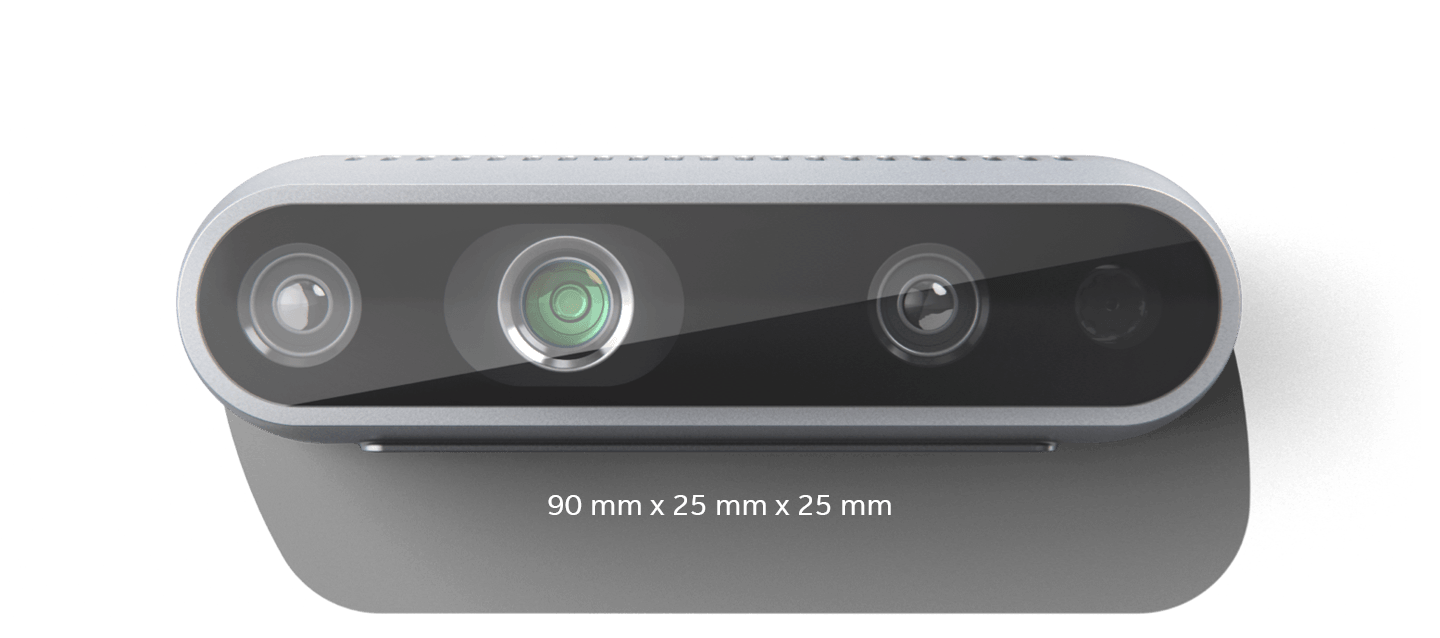
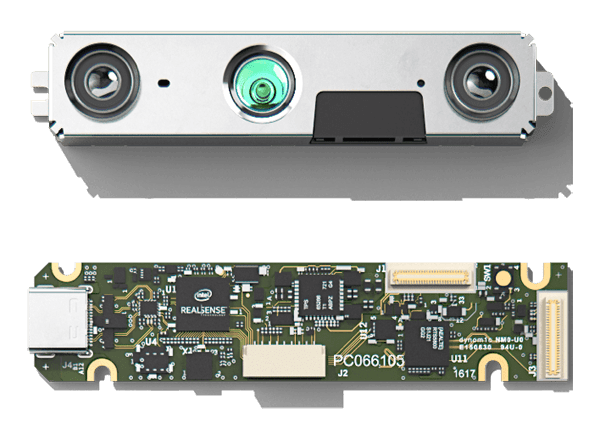
Depth Camera D415-D435-D435i-D455 на базі модулів Depth Module D400-D430. Дана лінійка камер від 415-ї до 455-ї моделі нарощує свій функціонал і продуктивність.
Ці камери працюють за технологією стереоглибини Stereo Depth (Depth from Stereo), тобто визначають відстань на підставі відмінності в зображеннях з двох приймачів (ІЧ-камер), спрямованих в одному напрямку і поєднуючи ці дані з одержуваної відеокамерою картинкою. Розташування випромінювачів і приймачів показано на зображенні:
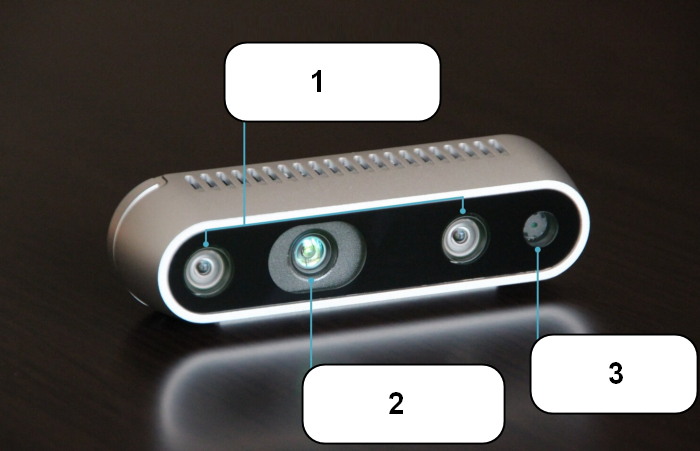
Де позначено:
- Датчик об'єму (інфрачервоний приймач).
- Інфрачервоний випромінювач.
- Відеокамера.
Depth Camera D415 призначена для вимірювання глибини зображень шляхом проставлення кожному пікселю зображення свого значення відстані від камери до об'єкта зйомки.
Дана камера є ідеальним варіантом для 3D-сканування, розпізнавання особи і інших вимірів даних глибини і підходить для розробників, виробників і новаторів, які прагнуть використовувати дані глибини зображень.
Depth Camera D435 оснащена камерою з широким кутом огляду та є ідеальним варіантом для додатків автоматизованої навігації і распознаанія об'єктів.
Depth Camera D435i є модифікацією камери глибини Intel RealSense Depth Camera D435 з додаванням інерційного вимірювального модуля inertial measurement unit (IMU), який дозволяє визначити положення (рух і повороти) в 6 ступенях свободи (6 degrees of freedom - 6DoF). Він комбінує дані з різних сенсорів з гіроскопами для визначення як обертання, так і руху в 3-х вісях, а також тангажу, нишпорення і крену. Він застосовується для стабілізації зображення при русі камери, що важливо в ігрових та мобільних пристроях.

Маючи камеру з широким кутом огляду, даний пристрій є ідеальним варіантом для додатків автоматизованої навігації і распознаанія об'єктів, дозволяючи точно отримувати дані в русі.
Depth Camera D455 є на сьогодні топом лінійки камер глибини Intel® RealSense™ Depth Camera D4хх. Вона оснащена інерційним вимірювальним модулем IMU, який дозволяє визначити положення (рух і повороти) в 6 ступенях свободи. Модуль комбінує дані від різних сенсорів з гіроскопами для визначення як обертання, так і руху в 3-х напрямках, а також тангажу, нишпорення і крену. Він застосовується для стабілізації зображення при русі камери, що важливо в ігрових та мобільних пристроях.

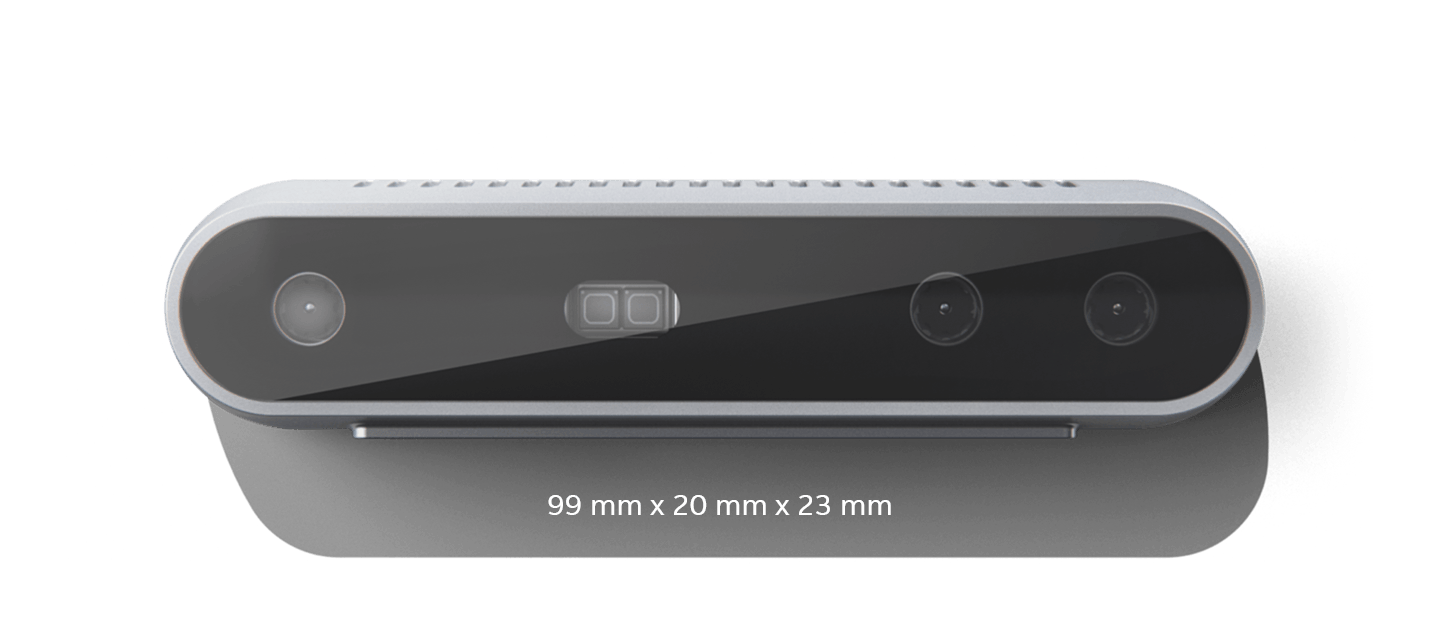
Особливістю даної моделі є те, що відстань між ІЧ-сенсорами збільшено до 95мм шляхом розміщення їх по краях модуля, що покращує визначення глибини зображення (помилка визначення не перевищує 2% на дистанції 4м).
У камерах RealSense™ серії D400 застосовується візуальний процесор Intel® RealSense™ D4, який використовує складні алгоритми для обробки зображень, отриманих 3D-камерою, а також обчислює 3D-карти з високою роздільною здатністю, при цьому немає необхідності у виділеному графічному або хост-процесорі. Використання цього відеопроцесора прискорює процес проектування і збільшує пропускну здатність для хост-процесора в системі.

Модулі Depth Module D400-D430, на базі яких збираються камери серії D400 — це готове рішення для прискорення розробки і інтеграції нової продукції для систем віртуальної (VR, Virtual Reality) і доповненої реальності (AR, Augmented Reality), робототехніки, дронів і інших галузей застосування. Вони використовують технологію визначення глибини з активним (D410, D415, D430) і пасивним (D400, D420) стерео режимом, технологію сенсора зображення: Global Shutter і Rolling Shutter, мають 2 варіанти Depth FOV — кута огляду (63.4°×40.4° та 85,2°×58°) і мають глибину роздільної здатнотсі 1280х720 пікс. при 90fps. Детальніше з технічними характеристиками модулів можна ознайомитися за посиланням: https://www.intelrealsense.com/stereo-depth-modules-and-processors/
Для роботи з даними камерами компанія Intel надає набір засобів розробки — RealSense SDK 2.0 з можливістю самокалібрування камер, що дозволяє проводити калібрування камер менш ніж за 15 секунд без необхідності використання спеціалізованих додатків і апаратури. Цей комплект дозволяє витягувати дані просторових параметрів з камер обсягу і переводити їх в формат обраної платформи — Windows, Linux, macOS та інших. Пакет SDK також пропонує зразки відкритого вихідного коду і оболонки для різних мов програмування, включаючи Python, Node.js, C# /. NET і C/C++.
Завершуючи огляд лінійки продукції RealSense™, можна сказати, що компанія Intel надала можливість використовувати готові "коробкові" апаратні рішення для різних галузей, які використовують комп'ютерний зір. Будь то трекінг, система запобігання зіткнень або системи розпізнавання жестів — для вас не буде проблемою підібрати відповідне за технічними параметрами і раціональне за ціною обладнання в нашому інтернет-магазині evo.net.ua.
