









")























|
Кількість
|
Вартість
|
||
|
|
|||
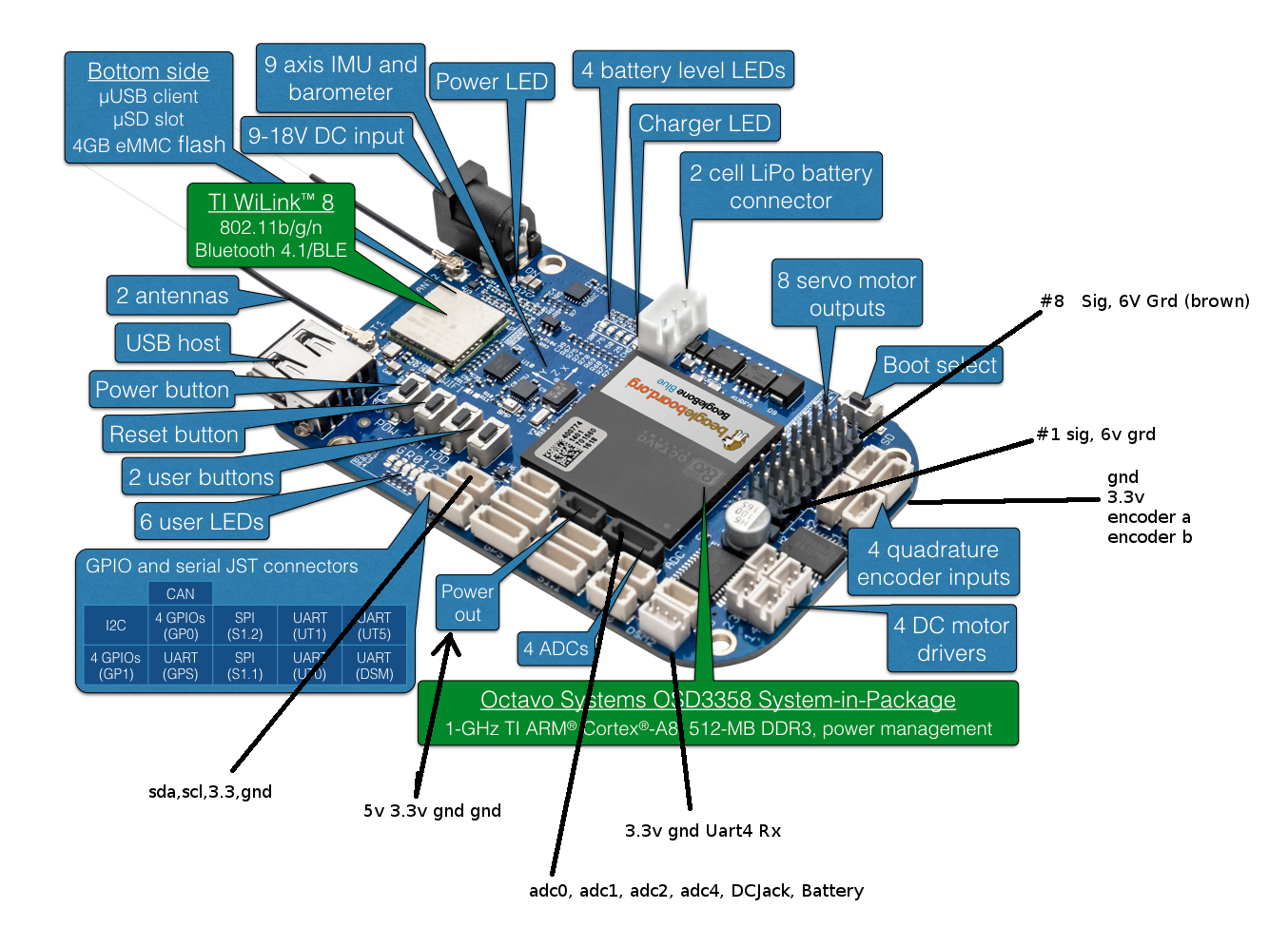
BeagleBone® Blue — це комп'ютер для робототехніки, створений на базі Linux. Інтегрований в невелику плату розміром 3.5 "x 2.15" з мікропроцесором Octavo OSD3358, разом з wi-fi / bluetooth, IMU / барометром, регулятором потужності, індикатором стану зарядки, H-Bridges, дискретними роз'ємами для генераторів постійного струму, 8 роз'ємів для сервоприводів і для безлічі інших периферійних пристроїв. Відкритий вихідний код, потужна підтримка спільноти і широкий спектр можливостей робить створення невеликих роботів з BeagleBone® Blue дуже простим, цікавим і доступним.
BeagleBone® Blue поєднує в собі високопродуктивний гнучкий інтерфейс WiFi / Bluetooth WiLink ™ BeagleBone® Black Wireless і можливості робототехніки Robotics Cape від Strawson Design. BeagleBone® Blue має вбудоване управління двоелементною (2S) батареєю LiPo із зарядним пристроєм і світлодіодами рівня заряду батареї, 8 виходів серводвигунів, 4 драйвера двигуна постійного струму, 4 входи квадратурного енкодера, широкий спектр роз'ємів GPIO і послідовних протоколів, включаючи CAN, 9-осьової IMU і барометр, 4 входи ADC, USB-інтерфейс ПК, хост-порт USB 2.0, кнопка скидання, кнопка живлення, дві кнопки, що настроюються користувачем і шість індикаторних світлодіодів.
BeagleBone® Blue призначений для розробки проектів в області інтернету речей, розумного будинку, промислової автоматизації та управління процесами, людино-машинного інтерфейсу, управління приводами і дронамі, а також концентратора різних датчиків або в інших областях робототехніки.
BeagleBone® Blue, створений на основі пакета System-In-Package компанії Octavo Systems, який об'єднує високопродуктивний процесор TI ARM і 512 МБ пам'яті DDR3, завантажує Linux приблизно за 10 секунд і дозволяє вам почати розробку через веб-браузер менш ніж за 5 хвилин з допомогою всього лише одного один USB-кабель.
Основні особливості:
Процесор: Octavo Systems OSD3358
- Процесор AM335x 1GHz ARM® Cortex-A8
- Оперативна пам'ять 512MB DDR3
- 4GB 8-bit eMMC вбудованої флеш-пам'яті
- Вбудоване управління живленням
- 2 × 32-бітних 200-МГц програмованих блоку реального часу (PRU)
- ЦП підтримує прискорювач NEON з плаваючою комою
- ARM Cortex-M3
- USB2 host / client
Роз'єми і датчики
- Акумулятор: 2-cell LiPo, світлодіодний монітор для перевірки стану заряду
- Вхід зарядного пристрою: 9-18V
- Бездротове з'єднання: 802.11bgn, Bluetooth 4.1 and BLE
- Управління двигунами: 8 6V серво виходу, 4 двонапрямлених виходу двигунів постійного струму, 4 входи квадратурного енкодера
- Датчики: 9-осьової IMU (акселерометр, гіроскоп, магнітометр), барометр, термометр
- Інтерфейс: 11 програмованих світлодіода LED, 2 програмовані кнопки
- Легко підключаються JST інтерфейси для додавання доп. роз'ємів і пристроїв таких як: GPS, DSM2 radio, UARTs, SPI, I2C, аналоговий 1.8V, 3.3V GPIOs
Сумісне ПЗ
- ROS, ArduPilot
- MATLAB and Simulink
- LabVIEW
- Cloud9 IDE on Node.js
- Python, OpenCV, ...
Технічні характеристики:
| Елемент | Опис | |
|---|---|---|
| Процесор (інтегрований в OSD3358): | ● AM335x 1GHz ARM® Cortex-A8 ● Графічний прискорювач SGX530 ● NEON прискорювач з плаваючою комою ● 2x 32-бітних мікроконтролерів PRU 200 МГц |
|
| Обсяг пам'яті: | ● ОЗУ 512 МБ DDR3 800 МГц (вбудовано в OSD3358) ● Вбудована 8-бітна флеш-пам'ять eMMC ємністю 4 ГБ ● Роз'єм SD / MMC для microSD |
|
Зв'язок: |
Високошвидкісний клієнтський порт USB 2.0: | доступ до USB0, клієнтський режим через microUSB |
| Високошвидкісний хост-порт USB 2.0: | доступ до USB1, гніздо типу A, 500 мА LS / FS / HS | |
|
Підтримує наступні режими: |
2x2 MIMO | |
| AP | ||
| SmartConfig | ||
| STA | ||
| Wi-Fi Direct | ||
| Мережа через Wi-Fi на основі 802.11s | ||
| Последовательный порт: | UART0, UART1, UART5 доступні через 4-контактні роз'єми JST. | |
| UART2 доступний через 6-контактний роз'єм JST (роз'єм типу EM-506 GPS) | ||
| UART4 RX доступний через 3-контактний роз'єм DSM2. | ||
| WiLink 1835 Bluetooth 4.1 з BLE | ||
| I2C1 доступний через 4-контактний роз'єм JST | ||
| SPI1 CS0 (S1.1) і SPI1 CS1 (S1.2) доступні через 6-контактні роз'єми JST | ||
| CAN доступний через 4-контактний роз'єм JST (включаючи трансивер CAN1051 CAN) | ||
| 8 GPIO (GP0 і GPI1) доступні через 6-контактні роз'єми JST | ||
| ADC Входи АЦП з 0 по 3 доступні через 6-контактний роз'єм JST | ||
| Вихід живлення 3,3 і 5 В постійного струму через 4-контактний роз'єм JST | ||
| Управління енергоспоживанням: | TPS65217C PMIC використовується разом з окремим LDO для забезпечення живлення системи (інтегрований в OSD3358) | |
| Зарядний пристрій для 2-елементних (2S) LiPo акумуляторів (живлення від роз'єму 9 - 18 В постійного струму) 4 світлодіода рівня заряду батареї 1 світлодіод зарядного пристрою |
||
| Регулятор 6VDC 4A для управления выходами серводвигателя | ||
| Підтримка налагодження: | контрольні точки JTAG | |
| Джерело живлення: | microUSB USB 2-елементний (2S) роз'єм LiPo акумулятора 9 - роз'єм постійного струму 18 В постійного струму |
|
| Призначений для користувача ввід / вивід: | Кнопка живлення Кнопка скидання Кнопка завантаження 2 кнопки, що настроюються користувачем 6 світлодіодів, що настроюються користувачем; Індикатор живлення |
|
| Управління двигуном (Потрібне живлення від роз'єму постійного струму або батареї 2S): |
4 драйвера двигуна постійного струму 4 входи квадратурного енкодера 8 виходів серводвігателя |
|
| Датчики: | 9-осьовий IMU Барометр |
|
Елементи плати:
Ресурси для розробників Wiki: BeagleBone® Blue Schematic