









")


















|
Кількість
|
Вартість
|
||
|
|
|||
Intel RealSense Depth Module D430 — це модуль з випромінювачами і приймачами Intel® RealSense ™ Depth Module D430, що покладений в основу роботи камери глибини Intel RealSense Depth Camera D435i. Даний модуль є ідеальним варіантом для реалізації програм автоматизованої навігації і распознаанія об'єктів.
Увага! Плата відеопроцесора Vision Processor D4 Board V2 до комплекту поставки не входить!
Відмінні особливості:
- Відеопроцесор Intel® RealSense ™ Vision Processor D4
- Плата процесора Intel® RealSense ™ Vision Processor D4 Board V2 (IMU Version), оснащена інерційним вимірювальним модулем
- Підтримує широкоформатні стереозображення Wide Stereo Imagers
- Має ширококутний інфрачервоний проектор Wide Infrared Projector
Intel RealSense Depth Module D430 оснащений інерційним вимірювальним модулем inertial measurement unit (IMU), який дозволяє визначити положення (руху і повороти) в 6 ступенях свободи (6 degrees of freedom - 6DoF). Він комбінує дані з різних сенсорів з гіроскопами для визначення як обертання, так і руху в 3-х осях, а також тангажу, нишпорення і крен, і застосовується для стабілізації зображення при русі камери, що важливо в ігрових і вказують пристроях.
Особливістю даної моделі є те, що відстань між ІК-сенсорами збільшено (сенсори розміщені по краях модуля), що покращує визначення глибини зображення.
Відеокамера призначена для вимірювання глибини зображень шляхом проставлення кожного пікселя зображення свого значення відстані від камери до об'єкта зйомки. Дана камера працює за технологією стереоглубіни (Stereo Depth), тобто визначає відстань на снованіі відмінності в зображеннях з двох камер-приймачів, що працюють в інфрачервоному діапазоні і спрямованих в одному напрямку.
Для роботи з модулем камери виробник надає пакет Intel RealSense SDK 2.0 з відкритим вихідним кодом, який не залежить від платформи і підтримує Windows, Linux, Android і macOS.
Технічні характеристики:
| Галузь застосування | в приміщеннях, поза приміщеннями |
| Технологія глибини | Активний ІК-стерео |
| Кут огляду RGB-сенсора (По горизонталі x вертикалі x діагоналі) |
69.4° x 42.5° x 77° (+/- 3°) |
| Глибина поля зору (FOV) (По горизонталі × вертикалі × діагоналі) |
85.2° x 58° x 94° (+/- 3°) |
| Вихідна роздільна здатність потоку глибини | до 1280 x 720 |
| Частота кадрів вихідного потоку глибини | до 90 кадрів в сек. |
| Мінімальна відстань по глибині (Min-Z) | 0.1m |
| Тип затвора датчика | Глобальний затвор |
| Ідеальний діапазон | 10 метрів; Залежить від калібрування, розташування і умов освітлення |
| Роздільна здатність датчика RGB і частота кадрів | 1920 x 1080 при 30 кадрах в в сек. |
Елементи модуля:
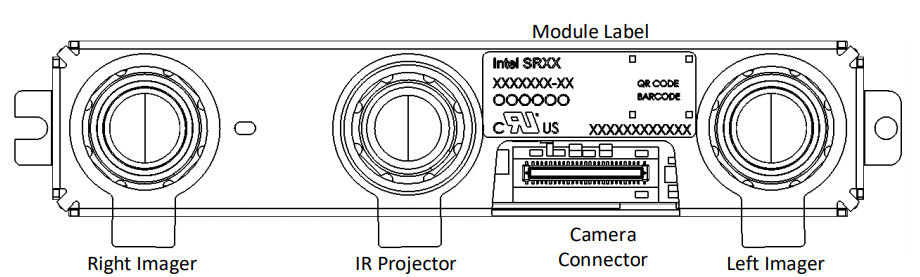
Right Imager - приймач правого каналу
Module Label - Мітка модуля
IR Projector - інфрачервоний випромінювач
Camera Connector - з'єднувальний роз'єм
Left Imager - приймач лувого каналу